

Давно бродит идея собрать робота – гуманоида с ногами, руками. Для начала решили создать управляемый захват, который в дальнейшем может быть применен в полномасштабном роботе.
Сам по себе манипулятор – механический захват или рука – манипулятор широко распространенное устройство в механических цехах в качестве подающих или сортирующих устройств, в исследовательских лабораториях и даже в армии – там, где возможен риск работы для человека.
Навыки работы с Ардуино были нами получены при разработке различных небольших проектов от светильников до роботов – боевых машинок.
Наш робот – манипулятор представляет собой управляемый «захват» собранный на базе шасси электронного конструктора «Знаток».
Компоненты которые мы использовали:
- Ардуино Уно — купить ардуино уно — купить можно здесь;
- Шасси электронного конструктора «Знаток»;
- Захват (robot arm claw clamp gripper) – купить можно здесь;
- Серводвигатели SG90 и MG946R – купить можно здесь;
- Мотор — шилд для управления двигателями– купить можно здесь;
- Инфракрасный (ИК) датчик VS1838B –купить можно здесь;
- Пульт ИК управления;
- Аккумуляторы Li-ion 18650, батарея типа «Крона», батареи АА (6 шт.);
Ардуино Уно
Контроллер Ардуино UNO вполне достаточен для той небольшой задачи, которую должен выполнять наш робот – манипулятор: подъехать к объекту, захватить заданную конструкцию, переместить ее, освободив захват. Ардуино UNO функционально достаточен (по уровням сигналов, количеству цифровых и аналоговых входов/выходов и т.д.) для небольших задач, вроде нашей. Описание Ардуино UNO можно посмотреть здесь.
Конструкция платформы, привод, питание, и управление
Платформа
Платформа — шасси электронного конструктора «Знаток». На платформе установлено поворотное шарнирное устройство манипулятора (собственной разработки) с захватом, Ардуино Уно с мотор – шилдом, двигатели (два мотора постоянного тока, штатные конструктора «Знаток»), инфракрасный приемник, блоки питания, выключатели. Конструкция робота – манипулятора представлена на рисунке 1.
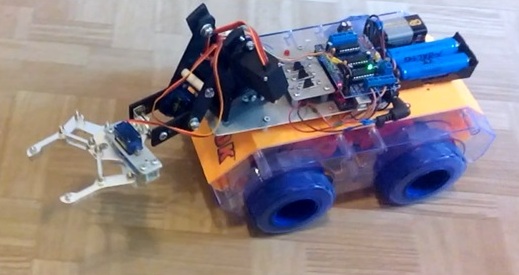
Движение манипулятора реализовано серводвигателями: тремя SG90 и одним MG946R
Питание робота
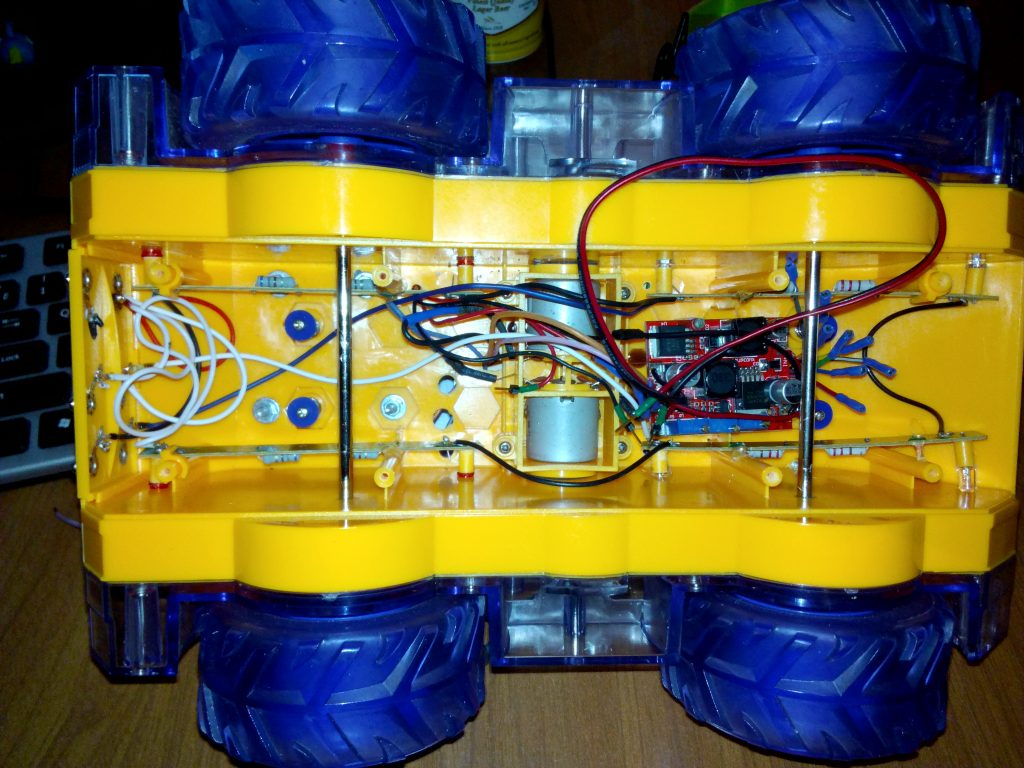
Мы выбрали наиболее правильный и оптимальный вариант питания с разнесением нагрузки системы управления и привода. Питание Ардуино UNO – от батареи типа «Крона», привода манипулятора – от блока из двух аккумуляторов Li-ion 18650 с установленным дополнительно регулятором напряжения, двигателей движения платформы – от 6 батарей АА. Привод шасси показан на рисунке 2 (вид снизу).
К сожалению, в нашей схеме есть недостаток: в случае полного разряда аккумуляторов Li-ion 18650, они придут в негодность, поэтому надо периодически самостоятельно измерять напряжения батарей аккумуляторов и подзаряжать их. Этого можно избежать дополнив схемой контроля разряда аккумуляторов – представлена, например, здесь.
ИК датчик, пульт управления
Приемник инфракрасного сигнала – датчик VS1838B. Питание ИК датчика 5 В — от Ардуино Уно.
Управление машинками выполняется инфракрасным сигналом с пульта. В качестве пульта применен пульт управления от программы AVerTV, представлен на рисунке 3.
Схема управления роботом — манипулятором
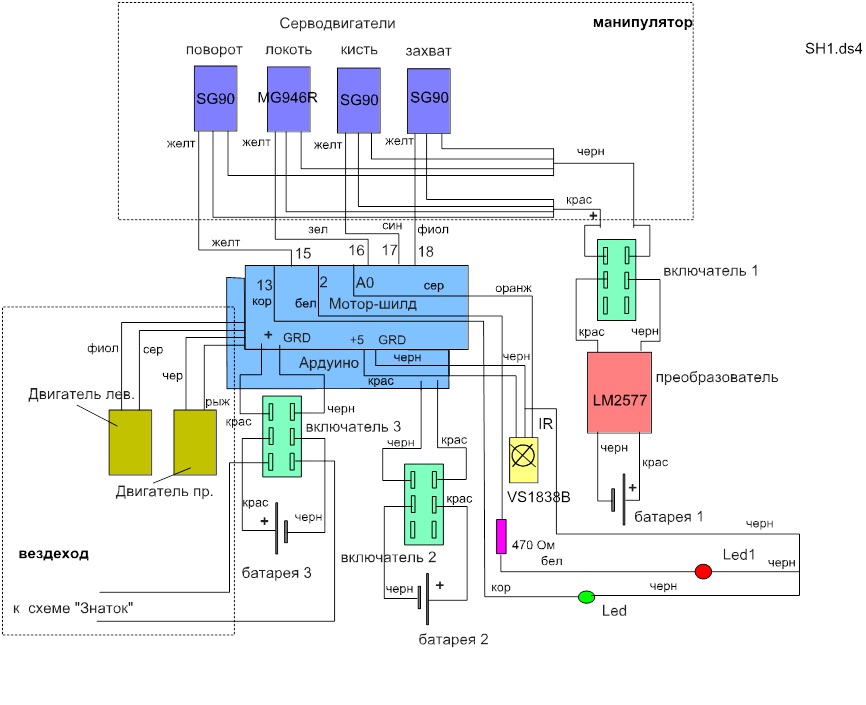
Схема разрабатывалась в редакторе «Designer», в результате представление элементов схемы носит произвольный характер (для белее стандартизованного представления можно использовать редактор fritzing). Схема соединений для управления роботом — манипулятором представлена на рисунке 4.
Программа управления – создание скетча
Программа управления создана на языке, применяемом в Ардуино Уно, который очень похож на язык «C». Особенности языка – читать здесь.
Алгоритм управления следующий: программа управления считывает код с ИК датчика и в соответствии с кодом выполняет следующие действия: движение платформы вперед, назад, вправо, влево или стоп (при отсутствии кода). Манипулятор управляется кодами, обеспечивающими: поворот шарнирного устройства, движение захвата вверх/вниз, захват/отпускание груза. Кроме того имеется возможность программного движения по заданной траектории и выполнение действий манипулятором по жестко заданной программе. Скетч управления роботом манипулятором оригинальный, имеет модульную структуру – по блокам каждого исполнительного механизма. В приложении представлен скетч для тестирования робота-манипулятора в автоматическом (без управления от пульта) режиме по жестко заданному алгоритму управления, скетч можно посмотреть здесь.
Коды управления для каждого положения пульта предварительно считаны используя специальную программу – скетч для считывая кодов с отображением на экране монитора программы IDE для ардуино.
Сама программа – скетч может быть написана в редакторе программы IDE ардуино. Загрузка исполняемого файла в Ардуино Уно выполняется из IDE. Подробнее о работе с программой IDE можно посмотреть здесь.
Испытание робота — манипулятора
Испытание робота – манипулятора показано в клипе. https://youtu.be/MBGtwBpTmM8
Удачных Вам конструкций.
